Robot til inspektion af ikke-magnetiske overflader
Ny fjernstyret robot skal effektivisere inspektionen af bl.a. broer og vindmøllevinger.
Formål
Periodisk inspektion af broer, vindmøllevinger mm. er ofte forbundet med høje omkostninger og mulige sikkerhedsrisici. Ved broer følger omfattende afspærringer og trafikale gener, mens vindmøllevinger skal tages ned fra møllen. En kompliceret og tidskrævende proces – ikke mindst offshore.Ved at bruge en fjernstyret robot til den indledende inspektion reduceres gener og omkostninger markant, da afspærring af broen eller afmontering af vindmøllevingen kun er nødvendig, hvis inspektionen afslører behov for vedligehold.
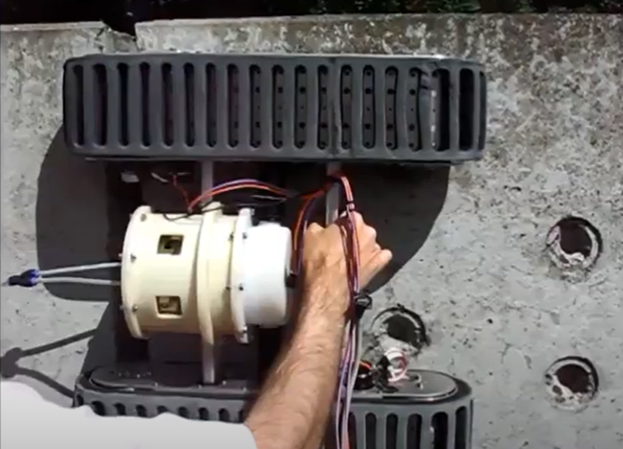
Formålet med dette demonstrationsprojekt er at dokumentere mulighederne for at kunne inspicere eksempelvis broer eller vindmøllevinger i drift ved hjælp af en nyudviklet, fjernstyret robot. Med et specielt vakuum-koncept skal robotten suge sig fast og køre på ikke-magnetiske overflader.
Målgruppe
Målgruppen er først og fremmest rådgivende virksomheder, statslige institutioner og virksomheder, som har behov for fjernstyrede inspektioner af store ikke-magnetiske overflader.Fremgangsmåde
I udviklingen af den nuværende prototype af robotten indgår følgende opgaver:- lettere modificering og optimering af robotten, så den kan opnå maksimal vedhæftningskraft på så forskelligartede overflader som rå betonoverflader og glatte vindmøllevinger
- konfiguration af robotten til de udvalgte inspektionsopgaver med inspektionsmoduler, herunder kamera til betonkonstruktioner og ultralyd til vindmøllevinger
- demonstration af robotten på udvalgte applikationer, som bliver stillet til rådighed af projektets øvrige deltagere, herunder en betonbro eller lignende betonkonstruktion samt en vindmøllevinge monteret på en mølle i drift
- afslutningsvis demonstration af robotten for øvrige interessenter, der ikke er projektdeltagere.
Resultater
Projektet er afsluttet med udviklingen af en robot-prototype og et dertilhørende vakuum-koncept, der er kraftigt nok til, at robotten kan køre på ikke-magnetiske overflader. Prototypen har fuldført testkørsler på Storebæltsbroen og en vindmøllevinge.I et nyt projekt, også i regi af RoboCluster, vil vi udvikle positioneringssystemer, der skal effektivisere brugen af robotten.

Steen Arnfred Nielsen
R&D coordinator, Digital Asset-Integrity Solutions, Commercial
T. +45 22 69 75 73
Kontakt Steen
Fakta om projektet
Projektperiode
2015 (afsluttet)
2015 (afsluttet)
Finansiering
Støttet af Innovationsnetværket RoboCluster
Officiel titel
Styrbar suge-crawler-robot til inspektion af ikke-magnetiske overflader