How to determine the power demand using RANS CFD
A self-propulsion tank test is typically conducted in the later design phase to verify the combined performance of the hull and propeller and to predict engine power demand.
By using RANS (Reynolds-Averaged Navier-Stokes) CFD, we can provide accurate predictions of key self-propulsion characteristics — such as thrust, torque, and propeller efficiency—early in the design phase. This allows for effective comparison of design variants before selecting the final hull form for tank testing.
The demand for complex CFD simulations, as a supplement to traditional towing tank tests, is increasing due to rapid advancements in computational power and techniques. In the past, we used simplified actuator disk models to address flow problems involving propellers. However, these models lacked the complexity needed to fully capture the hull-rudder-propeller interactions, limiting the quality of the results.
Increasing simulation complexity
To improve the accuracy of numerical self-propulsion simulations, we have recently implemented a more advanced body-force propeller model in StarCCM+. Based on quasi-steady blade element theory, this model adds more complexity than actuator disks while still reducing the computational cost compared to simulations with rotating geometries.
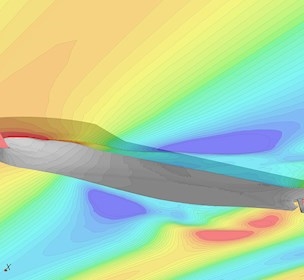
The model simplifies the propeller blades by treating them as 2D profile sections. For each section, we calculate local lift and drag, apply Prandtl's tip correction factor for vortex effects, and compute local thrust and torque. These values are then integrated from hub to tip to determine the total thrust and torque forces. The resulting blade loads are converted into body forces, which contribute to the flow acceleration in the RANS solution.
Demonstrating the accuracy of RANS CFD self-propulsion
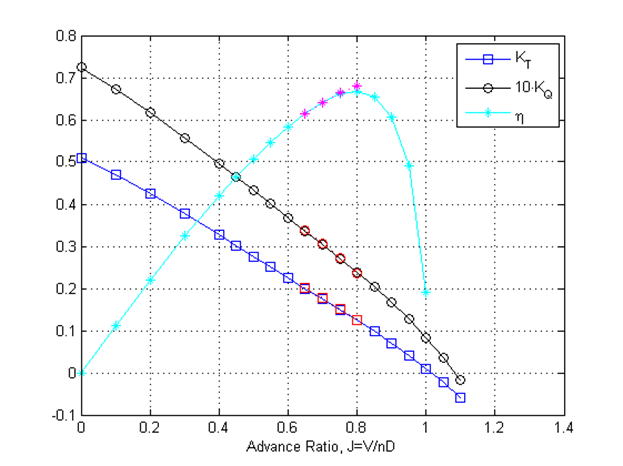
We conducted a study with the 230 m KCS hull and its MOERI propeller, scaled to 1:37. Initially, we tested the propeller model in open water, adjusting two correction coefficients for thrust and torque. These correction factors, determined from either EFD or CFD open water data, improve the model's accuracy.
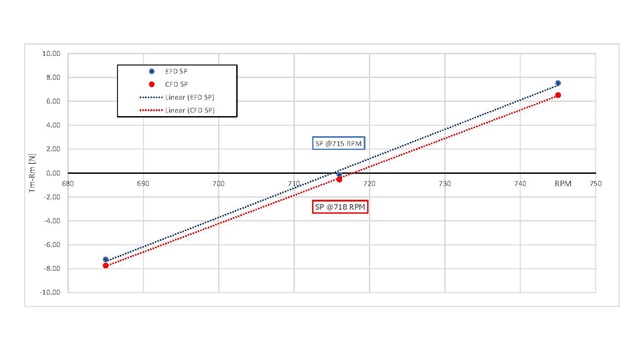
Once the open water coefficients were established, we inserted the propeller model behind the KCS hull to perform self-propulsion simulations. These simulations were compared to traditional towing tank results, showing excellent agreement with a maximum deviation of only 1.3% in thrust and 1.4% in torque - well within standard CFD margins.

Claus Daniel Simonsen

Article
Trim optimisation - an efficient tool for minimising energy consumption
Project
Ship Performance evaluation focusing on energy efficiency and safety

Article